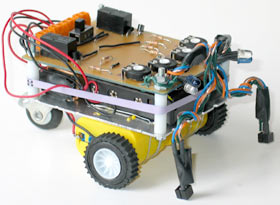
Robot constrido por alumnas
de 4º de ESO, curso 2004/05
|
Es un robot no programable que usa sensores
de infrarrojos tanto en la parte inferior como en la parte frontal.
Este robot se mueve por una superficie
negra y cuando encuentra un obstáculo o un borde cambia
de dirección y se dirige hacia otro lado, tanto los obstáculos
como los cráteres se detectan sin necesidad de contacto.
El cambio de sentido se realiza al detectar
uno de los sensores un obstáculo, pared clara, o un cráter,
por un borde blanco, esto invierte el sentido de giro de la rueda
del lado opuesto del robot, con una rueda girando hacia adelante
y otra hacia atrás el robot gira y evita el obstáculo,
transcurrido un un cierto tiempo la rueda que invirtió
el giro vuelve a girar hacia adelante y el robot se mueve en otra
dirección.
Este robot se puede mover por una superficie
ligeramente irregular, ya que los sensores de infrarrojos no necesitan
contacto directo con la superficie.
Se han utilizado circuitos temporizadores
y de infrarrojos.
|