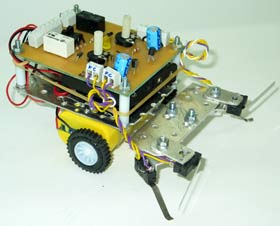
| Es un robot no programable que usa sensores
de contacto (finales de carrera) tanto en la parte inferior como
en la frontal.
Este robot cuando encuentra un obstáculo
o un borde de una superficie cambia de dirección y se dirige
hacia otro lado.
El cambio de sentido se realiza al detectar
uno de los sensores un obstáculo o un cráter, esto
invirte el sentido de giro de la rueda del lado opuesto del robot,
con una rueda girando hacia adelante y otra hacia atrás
el robot gira y evita el obstáculo, transcurrido un un
cierto tiempo la rueda que invirtió el giro vuelve a girar
hacia adelante y el robot se mueve en otra dirección.
Este robot no sería muy adecuado
para moverse por una superficie irregular como la de Marte, por
eso se han hecho otros dos diseños en los que se resuelve
este problema colocando sensores de infrarrojos en la parte inferior.
Se han utilizado dos circuitos
temporizados. |