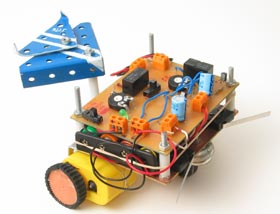
Robot construido por alumnos
de 4º de ESO, curso 2003/04
|
Cuando este robot detecta un obstáculo por contacto,
el robot gira y se dirige hacia otro sitio.
Para la detección de los obstáculos se utilizan
finales de carrera.
El cambio de dirección se realiza invirtiendo el sentido
de giro del motor del lado opuesto al sensor que detacta el obstáculo.
Circuito
temporizador
 |