Robot construido por alumnos
de 4º de ESO curso 2000/01
|
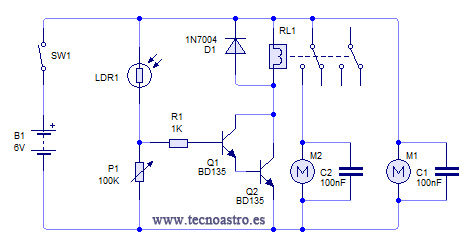
Descripción del funcionamiento:
Este robot sólo
utiliza un circuito detector de luz (LDR) que contrala el arranque
de uno de los motores.
Al conectar el robot, un motor empieza a girar (M1) y el otro está
parado (M2), esto hace que el robot gire sobre sí mismo, cuando
el sensor (LDR1) detecta una luz (linterna, ventana, etc.) los transistores se saturan y el relé (RL1) se activa arrancando el
otro motor (M2); con los dos motores en marcha el robot se dirige hacia
la luz.
Si el robot pierde la luz empieza a girar de nuevo sobre
sí mismo.
Circuito detector
de luz. |