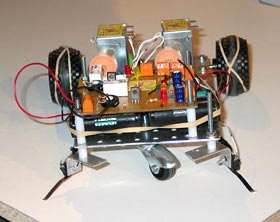
| Este robot es capaz de moverse por la superficie de una mesa
sin caerse. Cuando el robot detecta un borde el robot gira durante
un tiempo y se dirige hacia otro lado.
La deteccción de los borde se realiza por contacto mediante
dos finales de carrera..
El cambio de dirección se realiza invirtiendo el sentido
de giro del motor del lado opuesto al sensor que detacta el borde.
Se utilizarán dos circuitos temporizadores
|