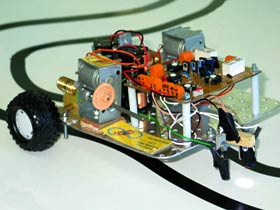
Robot construido por alumnas
de 4º de ESO curso 2002/03
|
Este robot es capaz de circular por una
pista marcada por dos líneas negras sobre fondo blanco.
Utilizan dos LDR para detectar la línea negra. Cuando
un sensor detecta una de las líneas se invierte el sentido
de giro del motor del lado opuesto, lo que hace que el robot corrija
su trayectoria.
Circuito detector
de luz. |